道閘一體機對接方案介紹
1.概述
1.1 編寫目的
本文檔介紹道閘一體機(包括費用顯示屏、車輛道閘、車輛識別攝像頭)接入到邊緣服務器的對接方案和設備驅動的開發流程。
1.2名詞解釋
名詞 | 解釋 |
Link IoT Edge | 物聯網邊緣計算產品(Link IoT Edge,簡稱LE),即阿里云物聯網平臺(IoT)中的邊緣計算產品。提供安全可靠的數據計算能力,可供本地處理設備數據,減少上傳云端的成本。 |
網關 | 運行Link IoT Edge軟件的計算設備統稱為邊緣網關或邊緣服務器,簡稱網關。 |
子設備 | 指通過一定的協議或接口接入到Link IoT Edge網關上的設備(即設備接入到網關后稱為子設備),網關代理該子設備與云端進行通信。 |
驅動 | Link IoT Edge中的設備接入模塊稱為驅動(driver)或設備接入驅動。所有連接到Link IoT Edge的設備都需要通過驅動實現接入。 |
2.系統架構圖
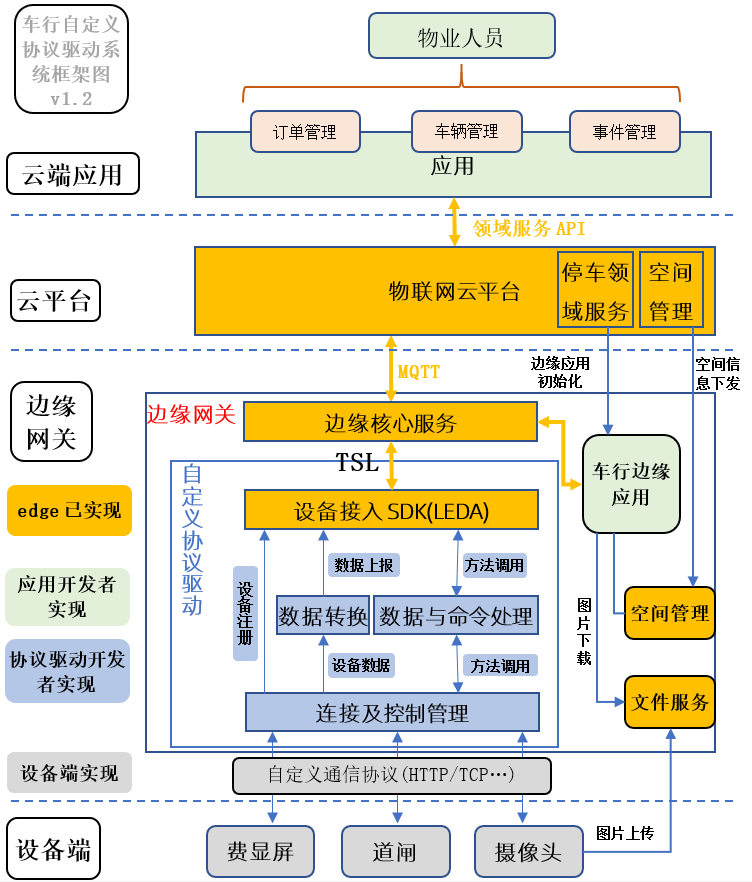
圖解說明:
① 云端應用:停車應用軟件。功能包括訂單管理、車輛管理、事件管理等,該軟件基于云平臺提供的領域服務API開發,實現對設備上報事件的處理及對設備的控制。
② 云平臺:物聯網云平臺。向托管在邊緣網關內的停車應用軟件提供空間管理及停車領域服務。向自定義驅動提供物模型。
③ 邊緣網關:邊緣網關內主要角色分自定義協議驅動和停車邊緣應用,驅動運行在LE組件中,負責管理及控制設備,其中包含阿里云提供的設備接入SDK(LEDA)部分和開發者實現部分。停車邊緣應用負責各場景應用實現。
④ 設備端:道閘一體機,包括攝像頭、道閘、費顯屏,設備供應商應提供設備通信協議,供驅動訪問或控制設備使用。設備供應商應提供硬件配置工具,可以進行設備初始化、設備參數配置及故障定位功能。
⑤ 圖片上傳:攝像頭應通過邊緣網關文件服務提供的訪問端口,使用HTTP協議上傳車輛及車牌圖片。
3. 交互流程
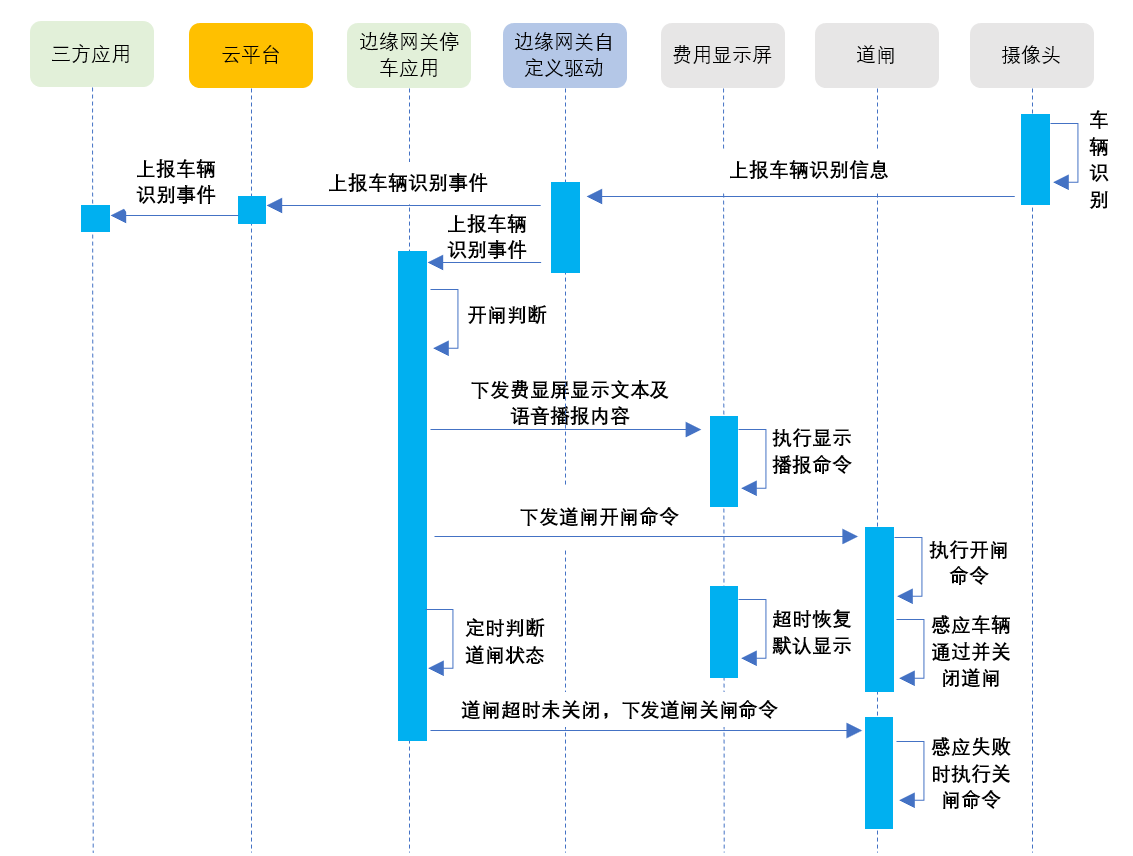
3.1 車輛入場/出場
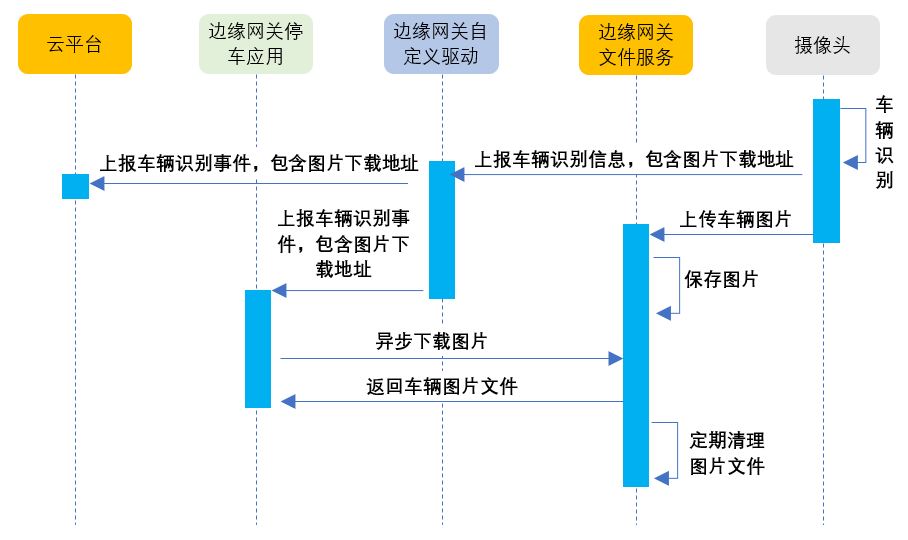
3.2 上傳車輛圖片
4.對接流程
4.1 明確方案分工
根據系統架構圖的內容,進行方案可行性評估,理解自定義協議驅動所處的位置。
明確各環節項目分工——需要設備端技術人員和協議驅動開發人員明確各自負責內容。
明確自定義協議驅動需要實現的功能,參考對應設備的物模型(請參考《3.3 道閘一體機設備物模型》文檔的物模型介紹)。
明確自定義協議驅動與設備的通信方式,需要設備廠商提供設備端SDK,使自定義協議驅動可以基于該SDK實現訪問設備數據和下發控制命令的功能。
4.2 信息收集
提供設備的硬件型號、設備ID。
4.3 驅動開發
參考《3.2 道閘一體機驅動開發指導》文檔,了解物聯網設備接入,熟悉LEDA接口,熟悉實現驅動的基本方式,開發自定義協議驅動。
參考《3.4 邊緣文件服務接口說明》文檔,實現車輛圖片上傳功能。
自定義協議驅動需通過驅動日志確認設備向云平臺注冊上線的接口被調用,并保證設備持續穩定地處于在線狀態。
自定義協議驅動需通過驅動日志確認設備上報事件的接口被調用,通過驅動日志確認服務方法接口被調用。
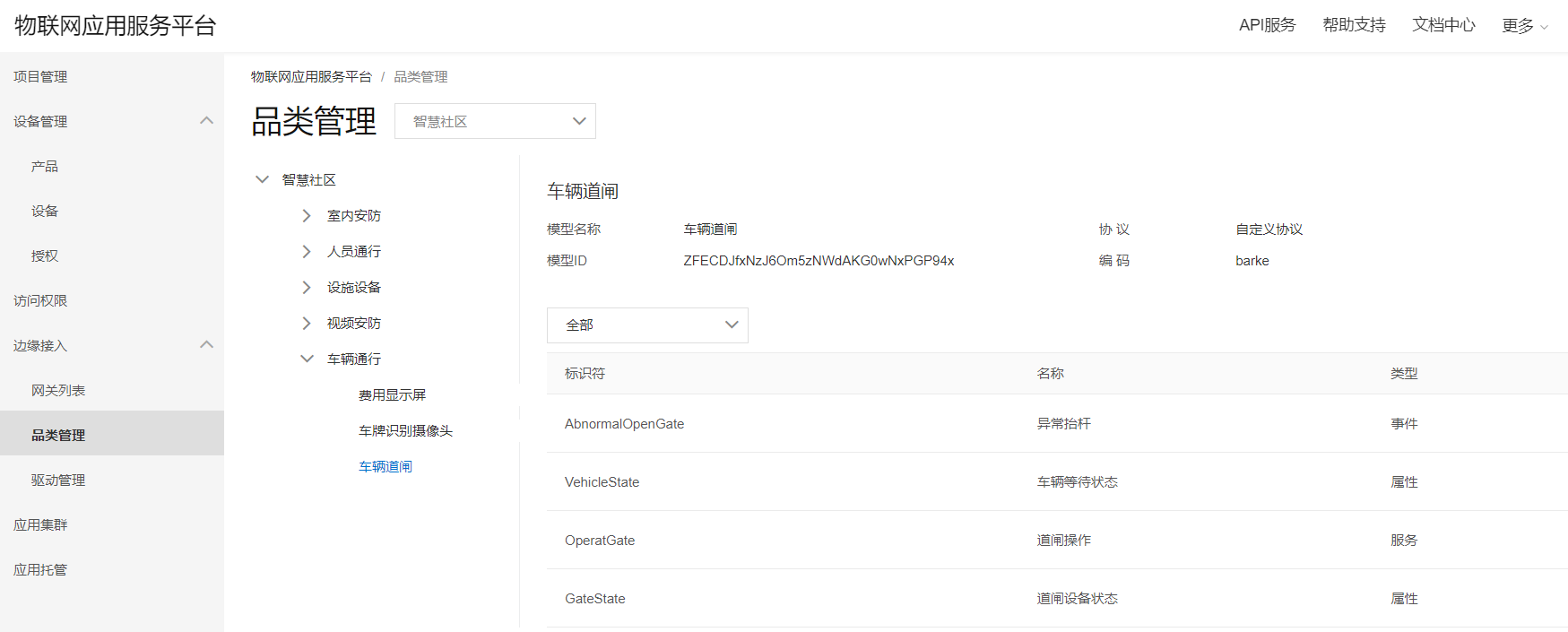
5. 物模型
請參考物聯網應用服務平臺里品類管理-車輛通行,如下圖所示:
附錄
驅動命名規則
在物聯網應用服務平臺,新創建的驅動英文名稱定義有下面的規范建議:
驅動名稱包含內容:
廠商名稱_廠商產品型號_適用領域_驅動功能
如果這個驅動是通用驅動,適用所有廠商,則驅動名稱里可以去掉廠商名稱和廠商產品型號;
如果這個驅動支持某個廠商的所有產品型號,則驅動名稱里可以去掉廠商產品型號。
適用領域說明:
人行:PerAccess(personal access)
車行:VehAccess(vehicle access)
EBA:EBA
安防:SecSystem(security system)
驅動功能說明:
例如EBA領域,Modbus功能,例如人行領域,可視對講功能。
驅動名稱使用大駝峰命名規范,即每個單詞的首字母都要求是大寫。
舉例說明:
有一個驅動,可以支持能效通公司的所有型號的EBA Modbus設備,驅動名稱可定義為:Nxtone_EBA_Modbus.