本文介紹如何使用Visual Studio Code - Alibaba Cloud Toolkit對ROS模板及資源棧實現便捷、高效的管理。
前提條件
- 下載并安裝Visual Studio Code。
- 已在IntelliJ IDEA中安裝和配置Cloud Toolkit,請參見在Visual Studio Code中安裝和配置Cloud Toolkit。
模板管理
Alibaba Cloud Toolkit - ROS LOCAL TEMPLATES、ROS REMOTE TEMPLATES是一個用于管理阿里云資源編排產品(ROS)模板的工具,它通過一個資源配置文件(.ros.config.yml),協助您對模板文件進行管理操作。
- ROS LOCAL TEMPLATES:幫助您便捷的管理本地的ROS模板。
- ROS REMOTE TEMPLATES:幫助您便捷的管理遠程賬號下的ROS模板。
模板編寫具備以下特點:
- 代碼塊功能:模板提供param和ref參數快捷創建方式。
- 代碼提示:在Resources下輸入資源類型中的關鍵字即可提示所有相關資源類型。例如:
- 輸入ECS會提示所有與ECS相關的資源類型,選擇您需要的資源類型。
- 在Properties下輸入屬性相關字母提示該資源類型的相關屬性,屬性名稱支持模糊匹配。
- 語法校驗:模板鍵值數據類型的校驗。
說明 .ros.config.yml文件是Alibaba ROS Templates工具用于管理模板的源文件。
- 在Visual Studio Code中打開您的工程。
- 在左側任務欄中選擇EXPLORER,單擊ROS LOCAL TEMPLATES右側的+。說明 目前支持JSON和YAML兩種格式創建資源編排模板。
- 編輯本地模板。在Resources參數中輸入資源類型。
- AlibabaCloud ROS YAML Template示例
- AlibabaCloud ROS JSON Template示例
本地模板管理功能操作說明如下。
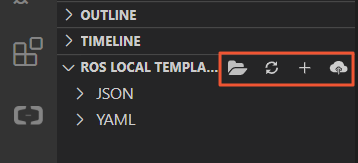
功能 描述 Open Folder 打開文件夾。 Refresh 刷新本地模板目錄。 Create 創建本地模板。首次使用此插件創建模板默認會創建JSON、YAML及.ros.config.yml文件。 Upload 上傳本地模板至遠端服務器。 - AlibabaCloud ROS YAML Template示例
- 右鍵單擊本地模板,可根據需求進行操作。
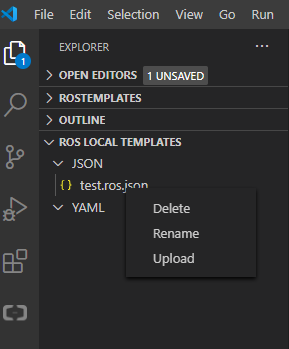
功能操作說明如下。
功能 描述 Delete 刪除本地模板。 Rename 重命名模板名稱。 Upload 上傳本地模板。 - 編輯遠端模板。鼠標懸浮至遠端模板,會顯示模板屬性信息。
遠端模板管理功能操作說明如下。
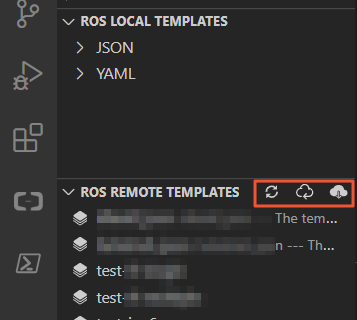
功能 描述 Refresh 刷新遠端模板目錄。 Update 更新遠端模板。 Download 下載遠端模板。 說明 單擊遠端模板,默認會打開一個臨時只讀模式文件。 - 右鍵單擊遠端模板,可根據需求進行操作。
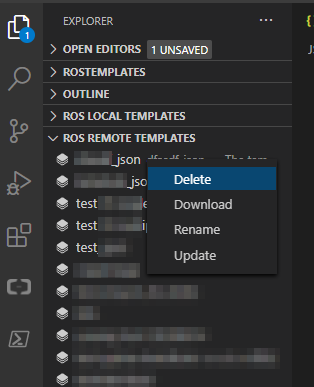
功能操作說明如下。
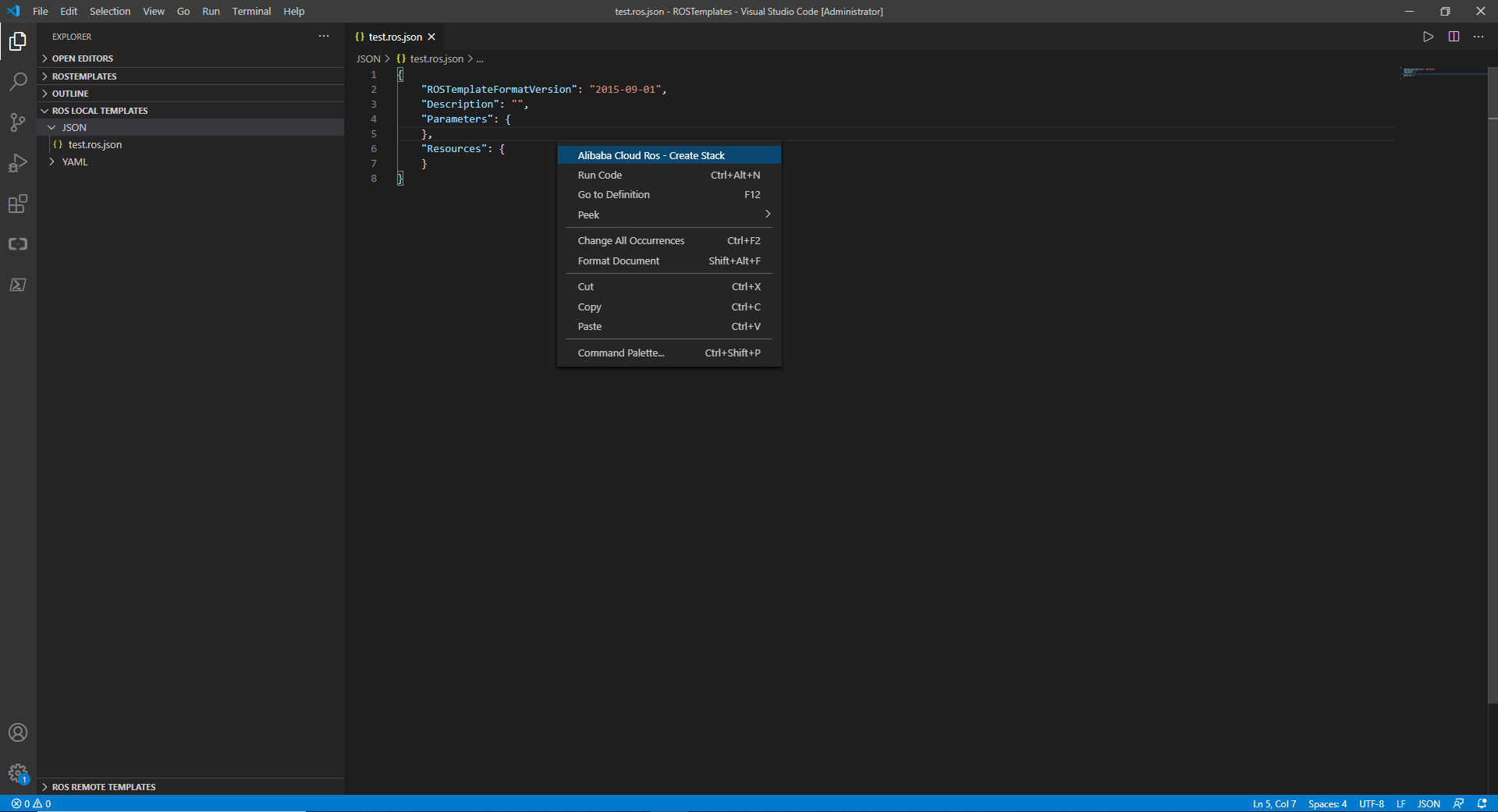
功能 描述 Delete 刪除遠端模板。 Download 下載遠端模板。 Rename 重命名遠端模板。 Update 更新遠端模板。 說明 更新遠端模板時,默認會打開一個遠端模板對比框,顯示對比遠端模板修改情況,可在右側模板中進行編輯,完成后右鍵單擊Alibaba Cloud Ros - Update Template,可更新遠端模板。 - 編輯區文件尾綴為.ros.json或者.ros.yaml時,右鍵單擊Alibaba Cloud Ros - Create Stack,可跳轉至創建資源棧。
資源棧管理
Alibaba Cloud VIEW - ROS View(Alibaba Cloud View)是一個用于管理阿里云資源編排產品(ROS)資源棧的工具,能幫助您便捷地管理遠端資源棧。
- 在Visual Studio Code中打開您的工程。
- 在Visual Studio Code窗口中選擇,可根據您的需求進行相關操作。
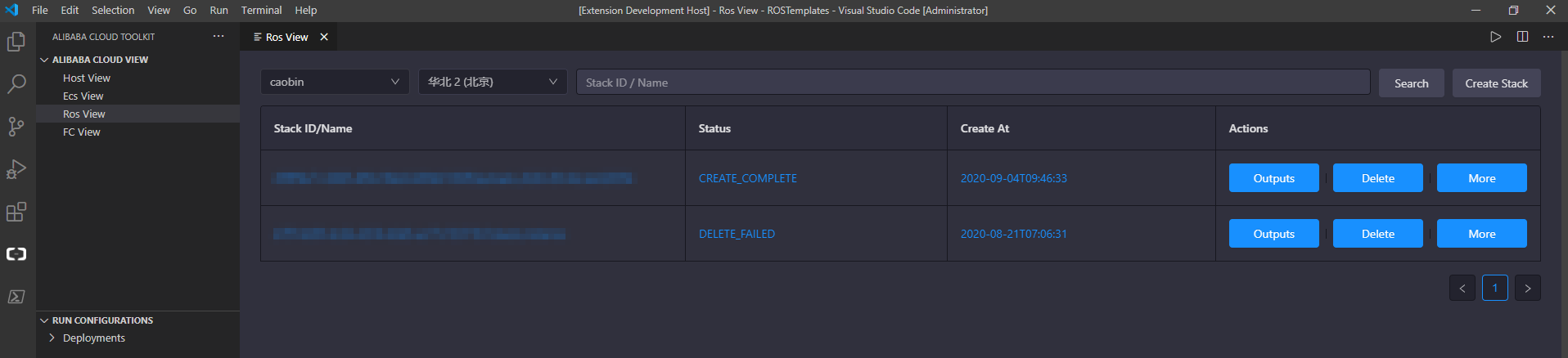
資源棧管理功能操作說明如下。
功能 描述 地域 選擇地域。 Search 在當前地域下,搜索資源棧ID或資源棧名稱;若未輸入,則刷新當前地域資源棧列表。 Create Stack 創建資源棧 ,自動跳轉至官網ROS控制臺創建資源棧界面。 Stack ID/Name 單擊名稱,顯示該資源棧屬性信息。 Status 顯示該資源棧當前狀態。 Create at 顯示該資源棧創建時間。 Outputs 顯示該資源棧的輸出值信息。 Delete 刪除該資源棧。 More - Properties:顯示該資源棧的屬性信息。
- Resources:顯示該資源棧內的所有資源信息。
- Parameters:顯示該資源棧的參數信息。